
Das ARGOS Instrument
Überblick
Das in den unteren Schichten der Atmosphere gestreute Laserlicht wird von Wellenfrontsensoren detektiert und die Ergebnisse an die adaptive Optik des Sekundärspiegels zur Wellenfrontkorrektur geleitet. Dies steigert die räumliche Auflösung des Teleskopes unter schwierigen atmosphärischen Verhältnissen.
 |
Leitstern: Künstlicher Stern, natürlicher Stern |
 |
Atmosphäre |
|
Teleskope: LBT |
 |
Optiken: Laser-Optiken, Tip-Tilt-Optiken |
 |
Bildsensoren: CCD, APD-Modul |
 |
Elektronik: Bonn-TT-Einheit entwickelt von unserer Gruppe, BCU |
 |
Online Software: ARGOS |
|
|
Unsere Beteiligung
Neben unserer Beteiligung zur Charakterisierung der CCD-Sensoren für den Wellenfrontsensor entwickelten wir eine Photonenzählereinheit für den ARGOS Tip-Tilt-Sensor. Durch die Montierung der Laser auf dem Teleskop benötigt man zusätzlich einen natürlichen Referenzstern zur Messung von Teleskop-Tip-Tilt. Das Licht des Referenzsterns belichtet ein Modul aus 4 Avalanche Photodioden (APD). Unsere Photonenzählereinheit zählt die detektierten Photonen, kompensiert den Zählwert jeder einzelnen APD hinsichtlich Nichtlinearität, Dunkelstrom und Quantenausbeute und errechnet aus den 4 Zählwerten die Position des Lichtstrahls auf dem Modul. Zur Echtzeitkorrektur wird das Ergebnis zum Kontrollsystem der adaptiven Optik übertragen. Durch die hohe Empfindlichkeit der APDs sind auch schwache Referenzsterne bis 19,2 mag für die Tip-Tilt-Korrektur nutzbar.


Photonenzählereinheit
Der erste Prototyp wurde aus Teilen unserer Speckle-Ausleseelektronik gebaut. Nach dem entgültigen Design wurden fünf identische Einheiten von grundauf neu aufgebaut. Jeder der beiden LBT Hauptspiegel ist mit einer Tip-Tilt-Einheit ausgerüstet. Dazu gibt es zwei Ersatzeinheiten und eine weitere Einheit, die für Tests und Verbesserungen im MPIfR verbleibt.


Die Photonenzählereinheit ist ein Mischsystem aus einem kommerziellen Einplatinenrechner (mit Linux Betriebssystem) und einer Platine mit einem Xilinx Spartan-3-FPGA zur Realisierung der Echtzeit-Schwerpunktberechnung und der Echtzeit-Datenschnittstelle. Die Bedienung der Einheit erfolgt über Ethernet-Sockets während der berechnete Schwerpunkt über ein RS-422-Protokol an den Kontrollrechner der adaptiven Optik übertragen wird. Zu Wartungszwecken und zum unabhängigen Betrieb verfügt die Einheit zusätzlich über ein serielles Terminal und eine USB-Schnittstelle.
Die Berechnung des Schwerpunkts
Die Berechnung des Schwerpunkt erfolgt im FPGA. Das Logik-Design (VHDL) macht Gebrauch von den integrierten Multiplizierern der Spartan-3 Architektur. Die Arithmetikoperationen sowie das serielle Protokoll sind im Logikbaustein implementiert und ermöglichen somit Echtzeitbetrieb. Die Berechnung des Schwerpunkts erfolgt in 3 Schritten.
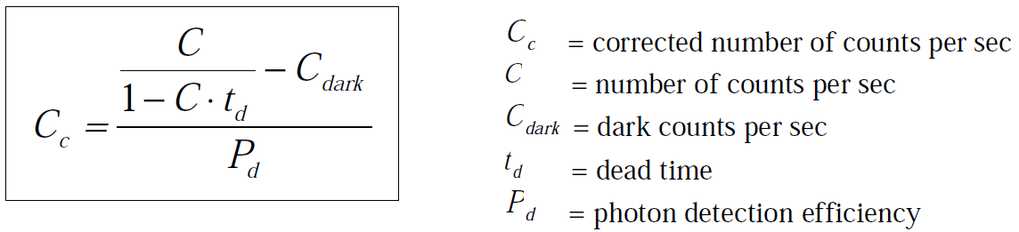
Zuerst werden die Zählwerte hinsichtlich Nichtlinearität, Dunkelstrom und Quantenausbeute korrigiert.
Im zweiten Schritt wird der Schwerpunkt aus allen vier korrigierten Zählwerten berechnet:
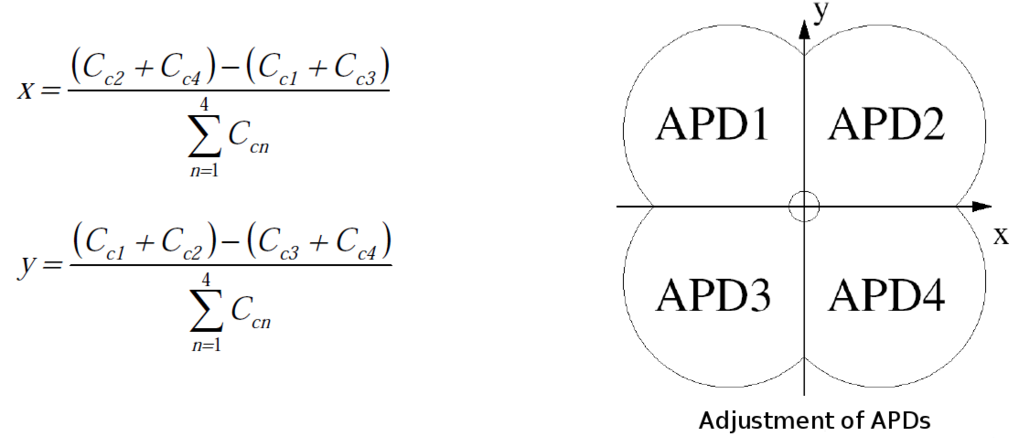
Cn ist der korrigierte Zählwert der n-ten APD im Koordinatensystem.
Der dritte Schritt ist die Derotation:
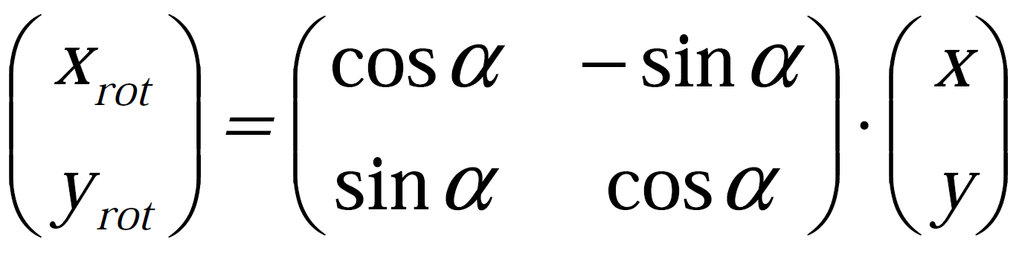
mit α als dem Rotationswinkel. Positive Winkel führen zu einer Rotation gegen den Uhrzeigersinn.
Projekt Meilensteine
- Phase A Study im Februar 2008
- Preliminary Design Review im Februar 2009
- Final Design Review im März 2010
- Commissioning geplannt für Januar 2014