
Das MATISSE Instrument
MATISSE (Multi-Aperture mid-Infrared SpectroScopicExperiment) ist ein Interferometrie-Instrument der zweiten Generation für das ESO Very Large Telescope Interferometer (VLTI). Das Zusammenschalten von drei oder vier Teleskopen ermöglicht es, Visibilities und Closure-Phases zu gewinnen und bietet die Möglichkeit, Bilder im mittleren Infrarotbereich zu rekonstruieren. Die maximale Basislinienlänge von 200 m (Entfernung zwischen zwei Teleskopen) führt zu einer hohen Auflösung der erzeugten Bilder.
Überblick
MATISSE arbeitet im Wellenlängenbereich von 2,8 µm bis 13 µm. Dazu wird das kombinierte Licht der Teleskope spektral dispergiert (zerlegt), um die Wellenlängenabhängigkeit von Visibility und Closure-Phase zu messen. Es werden zwei verschiedene Bildsensoren eingesetzt, um den breiten Wellenlängenbereich abzudecken. Zum einen einen Bildsensor (HAWAII-2RG) für den Wellenlängenbereich des L/M-Bandes (2,8 µm bis 5,2 µm) und zum anderen einen Bildsensor (Aquarius) für das N-Band (8 µm bis 13 µm). Der HAWAII-2RG-Bildsensor zeichnet sich durch niedriges Ausleserauschen aus, wohingegen der Aquarius-Bildsensor eine hohe Bildrate erlaubt, um trotz der hohen thermischen Hintergrundstrahlung genaue Messwerte zu liefern.
 |
Objektklassen: Kerne von aktiven Galaxien, protoplanetare Scheiben, Entwicklung von planetaren Systemen, Geburt massenreicher Sternen, Umgebung von heißen und sich entwickelnden Sternen |
 |
Atmosphäre |
|
Teleskope: ESO VLTI |
 |
Verzögerungsstrecken ESO Delay Lines |
 |
Optiken: Warme und kalte Optiken |

|
Bildsensoren: HAWAII-2RG AQUARIUS |
 |
Elektronik: ESO NGC (Next Generation Controler) |
 |
Instrumentensteuerungssoftware: MATISSE DCS (Detector Control Software) entwickelt von unserer Gruppe |
 |
Datenreduktionssoftware: MATISSE DRS (Data Reduction Software) teilweise entwickelt von unserer Gruppe |
Aufgabenbereiche
Unsere Gruppe ist verantwortlich für zwei Hauptbestandteile der Software für MATISSE. Dies ist zum einen die Detektorkontrollsoftware (DCS) und zum anderen die Datenreduktionssoftware (DRS).
MATISSE Detektorkontrollsoftware (DCS)
Die Detektorkontrollsoftware ist Bestandteil der Instrumentensoftware. Sie ist verantwortlich für die Steuerung der Ausleseelektronik und das Entgegennehmen und Speichern der von den Bildsensoren kommenen Daten.
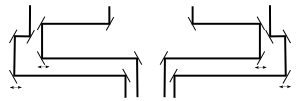
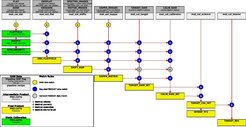
Übersicht über die Instrumentsoftware von MATISSE

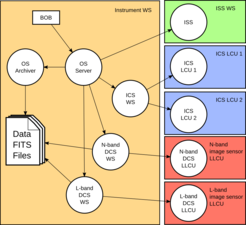
Wie in der Darstellung der Instrumentsoftware gezeigt, laufen die einzelnen Komponenten als eigenständige Prozesse auf unterschiedlichen Rechnern. Zur Steuerung der Hardware des Instruments dienen zwei Local-Control-Units (LCUs), die jeweils mehrere Aktuatoren (Motore, Servos und piezomechanische Positioniereinheiten) steuern und die Sensoren (für Temperatur, Druck und Position) einlesen. Für die Bildsensoren ist jeweils eine Linux Local-Control-Unit (LLCU) zuständig, die sowohl die Ausleseelektronik steuert, als auch die Bilddaten entgegennimmt, vorverarbeitet und weiterleitet. Eine Instrument-Workstation (IWS) verbindet diese vier Rechner und dient gleichzeitig als Schnittstelle zu den Teleskopen, den optischen Delay-Lines und dem Datenarchiv des Observatoriums. Das lokale Netzwerk des Instruments überträgt Steuerkommandos, Statusinformationen und Bilddaten zwischen den genannten Rechnern.
Die folgenden Softwarekomponenten bilden die Instrumentsoftware:
- Instrumentkontrollsoftware (ICS):
- Auf den beiden LCUs werden Schnittstellen zur Hardware bereitgestellt, dabei sind teilweise Echtzeitanforderungen zu erfüllen.
- Auf der IWS werden sowohl übergeordnete Schnittstellen als auch eine graphische Bedienschnittstelle zur Verfügung gestellt.
- Detektorkontrollsoftware (DCS):
- Auf den beiden LLCUs arbeitet jeweils ein Konrollprozess zur Steuerung der angeschlossenen Ausleseelektronik. Des Weiteren werden die empfangenen Rohdaten vorverarbeitet und an die IWS weitergeleitet.
- Auf der IWS ist pro Bildsensor ein eigener Prozess dafür zuständig, die Kommandos der Beobachtungssoftware weiterzuleiten und die Bilddaten entgegenzunehmen und abzuspeichern.
- Beobachtungssoftware (OS):
- Auf der IWS dient eine graphische Bedienschnittstelle dazu, alle Komponenten des Instruments zu steuern. Die Ablaufsteuerung einer Beobachtung wird ebenfalls von OS übernommen.
Detektorkontrollsoftware (DCS)
Die Detektorkontrollsoftware umfasst die Steuerung der Ausleseelektronik und die Aufbereitung, Anzeige und Speicherung der Rohbilder. Diese Funktionalität wird von spezialisierten Softwarekomponenten erfüllt, die Teil eines Softwarepakets der ESO ist.
Die Aufgabe unserer Gruppe besteht darin, die MATISSE spezifischen Anforderungen zu implementieren. Dies umfasst im wesentlichen die Aufbereitung der Rohbilder, das Verteilen der Rohbilder zu einem speziellen Verarbeitungsprozess und das Speichern in FITS-Dateien, einem speziellen Dateiformat. Die Rohdaten sind keine Bilder im herkömmlichen Sinne, sondern eine Kombination aus spektral dispergierten Interferogrammen, Spektren und Referenzdaten. Diese unterschiedlichen Informationen werden getrennt und in derselben Datei gespeichert. Weiterhin werden Zusatzinformationen des Instruments (zum Beispiel welche Filter verwendet wurden) ebenfalls in der Datei gespeichert. Die hohe Bildrate des N-Band-Bildsensors führt zu einer Datenrate von etwa 192 MByte/s direkt am Ausgang der Ausleseelektronik. Die Vorverarbeitung, Weiterleitung und Speicherung dieser Rohdaten erfordert einen effizienten Umgang mit den zur Verfügung stehenden Ressourcen (Netzwerk, Verarbeitungskapazität und Speicherbandbreite).
MATISSE DatenReduktionsSoftware (DRS)
Mit der Datenreduktionssoftware können aus den Rohdaten zusammen mit Kalibrationsdaten (Dunkelstrombild, Flatfield und Badpixel Map) über mehrere Zwischenschritte (kalibrierte Interferogramme, interferometrische Rohdaten und kalibrierte interferometrische Rohdaten) echte Bilder rekonstruiert werden. Weitere Aufgaben der Datenreduktionssoftware sind die Erstellung der Kalibrationsdaten und die Überwachung beider Bildsensoren.
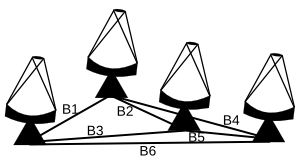
Grundlagen interferometrischer Beobachtungen mit MATISSE
Bei der optischen Long-Baseline-Interferometrie wird das Licht eines astronomischen Objekts (zum Beispiel Stern) von zwei oder mehreren Teleskopen überlagert (zur Interferenz gebracht). Das Ergebnis ist ein Interferenzmuster, das die Information über das Aussehen des astronomischen Objekts (Bild) nur verschlüsselt enthält. Erschwerend kommt hinzu, dass die Interferenzmuster durch den Einfluss der turbulenten Erdatmosphäre gestört werden. Im Falle von MATISSE ähnelt dies dem Doppelspaltexperiment, wobei pro Teleskop ein eigener Spalt verwendet wird. Um ein vollständiges Bild zu erhalten, müssen viele Aufnahmen, mit unterschiedlichen Teleskopabständen und Orientierung der Teleskope bezogen auf ein Objekt, gemacht werden. Anschließend kann mit Hilfe von Fourier-Methoden ein echtes Bild rekonstruiert werden.
Datenreduktionssoftware (DRS)
Rohdaten werden von der Datenreduktionssoftware in aufeinanderfolgenden Schritten bis zum fertig rekonstruierten Bild verarbeitet. Die Verarbeitungsschritte sind als Common-Pipeline-Library-Recipes (CPL-Recipes) in der ESO Pipeline-Struktur implementiert. Alle Verarbeitungsschritte können bei der ESO in Garching und auf jedem VLTI-Software-konformen Rechner ausgeführt werden. Des Weiteren werden die ersten Verarbeitungsschritte direkt am Observatorium auf dem Cerro Paranal abgearbeitet, um schon während einer Beobachtungsnacht die Qualität der Messdaten zu beurteilen.
Die Verarbeitung der Daten einer Beobachtung gliedert sich in die folgenden Schritte:
- Umwandlung der Rohbilder in kalibrierte Interferogramme und Spektren.
- Berechnung der interferometrischen Rohdaten (Visibility und Closure-Phase).
- Kalibrierung der interferometrischen Rohdaten.
- Rekonstruktion eines Bildes aus den kalibrierten Daten.
Unsere Abteilung ist verantworlich für die Umsetzung des ersten und letzten Schrittes. Zusätzlich gibt es noch weitere Verarbeitungsschritte, die der Kalibrierung der Daten und der Überwachung des Instruments dienen, die ebenfalls von uns bearbeitet werden:
- Berechnen der beiden Flatfield-Maps ausgehend von speziellen Rohdaten.
- Bestimmung der defekten Pixel (Badpixel-Map).
- Berechnung von Kennwerten für beide Bildsensoren (zum Beispiel Stabilität und Nachleuchten).
- Kontrolle ob beide Bildensoren noch innerhalb der festgelegten Spezifikationen arbeiten und ob eventuell externe Störungen auftreten (tägliche Kontrolle).
Rohdatenkalibration
In einem ersten Abeitsschritt werden die Rohdaten, die im FITS-Dateiformat vorliegen, kalibriert. Zusätzliche Kalibrationsdaten, wie die Flat-Field-Map, die Bad-Pixel-Map und die Distortion-Map werden dazu benutzt, die Instrument-, sowie die Detektoreffekte aus den Daten zu entfernen. Detektoreffekte sind z.B. ein Offset der Pixelwerte, kaputte Pixel aber auch Unregelmäßigkeiten in der Ausleuchtung bzw. der Verstärkung einzelner Pixel (Flat-Field). Durch die eingesetzten Optiken kommt es im Instrument zusätzlich auch zu einer Bildverzerrung, die korrigiert werden muss. Insbesondere im N-Band existiert ein starker thermischer Hintergrund, der ebenfalls entfernt werden muss um das schwache Signal eines astronomischen Objekts zu erhalten.
Die Schritte zur Umwandlung der Rohdaten in kalibrierte Interferogramme sind wie folgt:
- Zuerst wird entweder der Dunkelstrom oder der Himmelshintergrund von der Rohdaten abgezogen.
- Die unregelmäßige Ausleuchtung und die ortsabhängige Verstärkung werden mit Hilfe der Flatfield-Map kompensiert.
- Die defekten Pixel (markiert in der Badpixel-Map) werden aus den umgebenden Werten interpoliert.
- Die optische Verzerrung wird rückgängig gemacht.
- Die unterschiedliche Aufteilung des Lichts auf die photometrischen Kanäle und den interferometrischen Kanal wird kompensiert.
Das Ergebnis sind kalibrierte Interferogramme zusammen mit kalibrierten photometrischen Kanälen (Spektren), die anschließend weiterverarbeitet werden können.
Bildrekonstruktion
Die entwickelte Bildrekonstruktionssoftware ist in der Lage, Bilder von astronomischen Objekten zu rekonstruieren, die mit einem Interferometrieinstrument wie dem ESO VLTI beobachtet wurden. Als Grundlage dienen die kalibrierten interferometrischen Daten (Visibility und Closure-Phase). Dabei ist zu beachten, dass durch die begrenzte Anzahl an Teleskopen, deren gegenseitiger Abstand und die begrenzte Beobachtungszeit immer nur ein unvollständiger Satz an Daten existiert. Die fehlenden Informationen müssen durch geeignete Zusatzannahmen ersetzt werden, was jedoch nur teilweise gelingt. Daher ist es in der Regel nur möglich, ein angenähertes Bild eines astronomischen Objekts zu erhalten.
Ziel der Rekonstruktion ist es, ein Bild zu finden, das den kleinsten Abstand zu den gemessenen Werten besitzt. Der Abstand bezieht sich jedoch auf den Fourierraum und nicht auf das konkrete 2-dimensionale Bild. Die Zusatzannahmen werden ebenfalls mit diesem Abstand kombiniert. Ausgehend von einem Startbild wird nun iterativ versucht dieses zu modifizieren um das Bild mit dem kleinsten Abstand (die Rekonstruktion) zu finden. Durch die große Anzahl an Pixeln im rekonstruierten Bild, die Vielzahl an Messungen und die Nichtlinearität der Abstandsfunktion ergibt sich ein nichtlineares Optimierungsproblem. Dabei ist zu berücksichtigen, dass das Startbild für die Iterationen gut gewählt wird, da sich sonst das Lösungsverfahren in einem lokalen Optimum (falsches Bild) festfahren kann.
Die Datenrekonstruktionssoftware ist in der Programmiersprache ANSI C geschrieben und in die ESO Pipelinesoftware integriert.

Meilensteine des Projekts
- Kick-off Meeting im November 2006
- Phase-A Study im Juli 2007
- Preliminary Design Review im Dezember 2010
- Final Design Review im April 2012
- Present status: After the Final Design Review 2012 the manufacturing of the instrument subsystems has begun. The integration of the cold optics and detector in the cryostat is planned for the second half of 2013.
- Preliminary Acceptance Europe: 2015